




Introduction
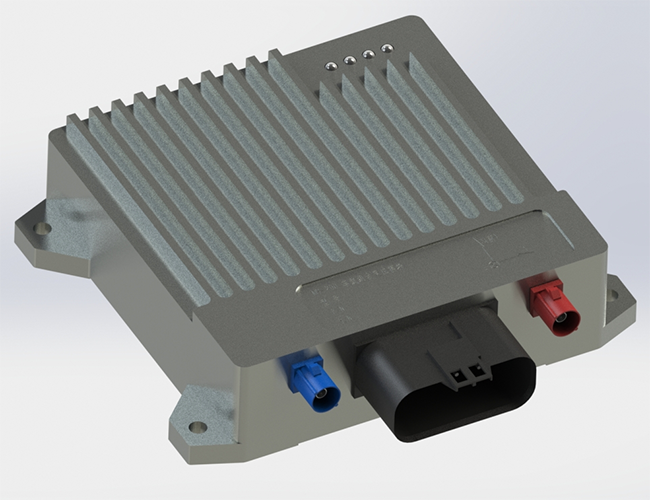
TDMS-200 high accuracy integrated navigation and positioning unit is a real-time navigation and positioning unit developed for auxiliary automatic driving of passenger cars. The TDMS-200 unit uses high-performance MEMS inertial sensors, high-precision GNSS board and on-board odometer to realize integrated navigation, which can output high-accuracy positioning, speed measurement and attitude information at the centimeter level in real time, and maintain a certain navigation accuracy after the satellite signal is lost. The product can be used for passenger cars and unmanned vehicles with automatic driving or intelligent driving function.
According to different project requirements, the core sensor of the product can be customized. The functionally safe IMU is used as the core sensor in the TDMS-200 unit, and the Z-axis (vehicle heading) gyro can be replaced with a higher accuracy sensor to further improve the pure inertial navigation accuracy after GNSS signal loss. It adopts a high-accuracy GNSS positioning module with RTK function, which supports multiple satellite signals such as BDS B1/B2, GPS L1/L2, GLONASS L1/L2, GALILEO E1/E5b, and supports multiple configurations such as single antenna positioning/double antenna orientation.
The product can become a customized inertial navigation system through software upgrade, and can also access other sensors to achieve multi-source integrated navigation.
The TDMS-200 unit adopts advanced technology in the design and manufacture process of components and systems, and is produced strictly in accordance with the vehicle standards. At the same time, the unit adopts anti-impact vibration design and other measures to ensure that the product can still accurately measure the position and attitude parameters of the carrier in the harsh environment.
At the IMU level, in addition to the selection of high-accuracy inertial sensors, static error compensation (zero position, scale factor, installation error and other fine compensation in the full temperature area), dynamic error compensation (cone error, boating error compensation) and other technologies are also carried out in the unit to ensure that the IMU obtains the best performance during use.
At the navigation algorithm level, the system adopted a tightly-coupled integrated navigation algorithm to ensure the integrated accuracy under the condition of few satellites. The online error estimation of key parameters such as IMU and odometry, and the navigation algorithm based on vehicle motion constraints can ensure that high navigation performance can be maintained after the satellite is lost.
The IMU compensation and navigation software is developed based on the system design specification, and the development process follows the requirements of ISO26262-6.
Vehicle intelligent driving system needs to autonomously perceive the precise position, speed, attitude and other information of the vehicle body in real time. TDMS-200 unit has the characteristics of high accuracy measurement, small size and low power consumption, which can well meet the above requirements.
Features
● ASIL-D functional safety IMU
● High performance Z-axis MEMS gyro
● -40℃ to +85℃ full temperature calibration and compensation
● Tightly coupled combination algorithm to improve the positioning stability in harsh environments
● High performance Z-axis gyro to ensure the short-term navigation accuracy after the satellite is lost
● Vehicle motion constrained navigation algorithm
● External odometer and other sensor data fusion
● Support single antenna/dual antenna multiple navigation modes
● Small volume, low weight, low power consumption
● Software online upgrade, automatic parameter calibration function
Application fields
● Driverless passenger cars
● Unmanned vehicle
● Mineral truck
● Real-time navigation and mobile mapping
Specification
|
GNSS Specification |
Signal Tracking |
BDS:B1/B2;GPS:GPL1/L2;GLONASS:1/L2; GALILEO |
||||
|
Positioning accuracy |
RTK: horizontal 2cm+1ppm, elevation 3cm+1ppm |
|||||
|
Orientation accuracy |
0.2°(1m baseline) |
|||||
|
Updating rate |
1Hz、5Hz |
|||||
|
Integrated Positioning performance (fused with wheel speed) |
Time |
Position accuracy(m) |
Speed accuracy(m/s) |
|||
|
Horizontal |
Elevation |
Horizontal |
Elevation |
|||
|
0s |
0.02 |
0.03 |
0.02 |
0.01 |
||
|
10s |
0.2 |
0.3 |
0.07 |
0.03 |
||
|
60s |
2 |
3 |
0.2 |
0.1 |
||
|
Attitude |
Heading |
0.2°(integrated navigation),0.1°(GNSS lost 60s) |
||||
|
Pitch/Roll |
0.1°(RMS) |
|||||
|
Sensors performance |
Gyroscope |
Measurement range:±300°/s;Bias instability:≤2°/h Z-axis(optional):±300°/s;Bias instability:≤0.5°/h |
||||
|
Accelerometer |
Measurement range:±6g;Bias instability:<50ug |
|||||
|
Phisical characteristics |
||||||
|
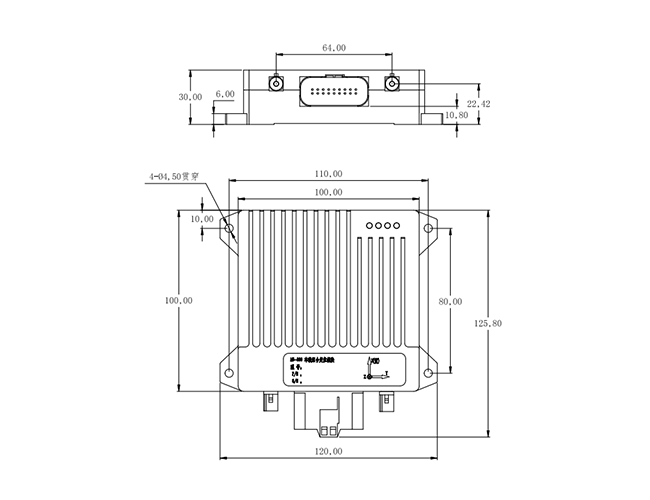
Sizes |
(L x W x H): 100mm x 100 mm x 30 mm |
|||||
|
Weight |
250g |
|||||
|
Environmental conditions |
||||||
|
Working temperature |
-40℃ ~ +85℃ |
|||||
|
Storage temperature |
-55℃ ~ +95℃ |
|||||
|
Power requirements |
||||||
|
Voltage |
+9~+36VDC |
|||||
|
Consumption |
≤8W |
|||||
|
Interface |
||||||
|
GNSS RF interface |
antenna:FAKRA type C/D,50Ω rated impedance |
|||||
|
Data input/output |
1 x 422,1 x 232,2 x CAN,1 x PPS_OUT |
|||||
PIN definition
|
PIN No. |
Definition |
PIN No. |
Definition |
|
1 |
POWER(+12V) |
10 |
RS422_TX+ |
|
2 |
PGND |
11 |
RS422_TX- |
|
3 |
CAN2_H |
12 |
RS422_RX- |
|
4 |
CAN2_L |
13 |
RS422_RX+ |
|
5 |
PPS |
14 |
SGND |
|
6 |
SGND |
15 |
RS232_TX |
|
7 |
CAN1_H |
16 |
RS232_RX |
|
8 |
CAN1_L |
17 |
RS232_GND |
|
9 |
SGND |
18 |
IGNITION |
Introduction TDMS-300Pro MEMS Integrated navigation system is a highly reliable and cost-effective six-axis MEMS inertial...
Introduction TDMS-300 MEMS integrated navigation system is a highly reliable and cost-effective six-axis MEMS inertial/sa...
Introduction TDMS-200 high accuracy integrated navigation and positioning unit is a real-time navigation and positioning ...



Thank you for your message and we will contact you within 24 Hours of your submission to resolve your issue
 Online consultation
Online consultation