




Introduction
TD-201 optical fiber integrated navigation system is a highly reliable and cost-effective optical fiber inertial/satellite integrated navigation system, which can be widely used in the navigation, control and measurement fields represented by high-precision vehicle, medium and long endurance UAV. TD-201 uses closed-loop fiber optic gyroscope (FOG) and high-precision accelerometer, combined with professional GNSS board and specially designed GNSS/INS data processing software (GINS), can provide accurate positioning information (longitude, latitude and altitude), attitude information (pitch, roll and heading), three-dimensional acceleration, angular velocity and other dynamic information. It is a high precision integrated navigation system.
The TD-201 series integrated navigation system can be configured with different hardware and software according to the needs of users. According to the characteristics of some navigation applications, the gyroscope can be replaced with a high-precision gyroscope, so as to meet the needs of different users to the greatest extent.
Features
●Lightweight and high-precision integrated navigation
●High performance, small size, low weight, low power consumption
●Closed-loop fiber optic gyro
●Small size, light weight, low power consumption
●Resistant to vibration shock and electromagnetic interference
●Reliable seal design to ensure normal operation in harsh environments
●provides inertial /GNSS integrated navigation function
Application fields
●Medium and long endurance UAVs
●Vehicle positioning and orientation
●Radar/infrared antenna stabilization platform
●Port measurement system
●mobile communication
●UAV/Vehicle/ship/boat attitude reference
●Attitude control
●steady control and sight equipment
●Boring machine/Automatic coal mining
|
Specification |
||
|
Performance |
Positioning accuracy |
5 m, 1σ(real-time) 0.05m (Differential post-processing) |
|
North seeking accuracy |
0.2°*sec (Latitude) ,1σ |
|
|
Heading |
0.05°, 1σ(real-time) 0.01~0.03°, 1σ(post-processing) |
|
|
Altitude |
0.01°, 1σ(real-time) 0.01~0.02°, 1σ (post-processing) |
|
|
Gyroscope |
Bias |
≤0.1 °/h(3σ) |
|
Bias stability |
≤0.03 °/h |
|
|
Bias repeatability |
≤0.03°/h |
|
|
Non-linearity |
≤50 ppm |
|
|
Accelerometer |
Bias |
≤ 0.5mg |
|
Bias stability |
≤0.1mg |
|
|
Bias repeatability |
≤0.1mg |
|
|
Measurement range |
Angular rate |
±300 °/s |
|
Accelerometer |
±10 g(customizable) |
|
|
Power supply |
Voltage |
9~36VDC(recommend 24V) |
|
Power Consumption |
≤15W |
|
|
Interface |
IMU port |
RS232/RS422; data rate: 200 Hz; |
|
GNSS Port |
RS232; Baud rate:115200 |
|
|
Environmental |
Working temperature |
-40°C ~ +60°C |
|
Storage temperature |
-50°C ~ +70°C |
|
|
Vibration |
|
|
|
Shock |
30 g, 11 ms, 1/2 Sine |
|
|
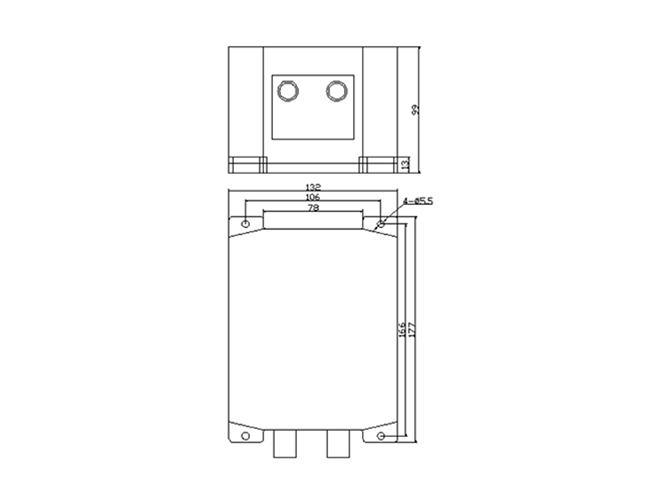
Physicals |
Size |
177 × 132 × 99 mm3 |
|
Weight |
≤3kg |
|
|
Pin definition |
|||
|
Pin No. |
Definition |
Pin No. |
Definition |
|
27 |
+24 VIN |
47 |
GGND1 |
|
28 |
+24 VIN |
32 |
INS_RS232_TXD |
|
1 |
+24 VGND |
33 |
INS_RS232_RXD |
|
2 |
+24 VGND |
34 |
GGND1 |
|
3 |
CANH |
36 |
IMU_RS232_TXD |
|
4 |
CANL |
37 |
IMU_RS232_RXD |
|
29 |
GGND2 |
35 |
GGND1 |
|
5 |
LCJ_G5V |
16 |
GPS_CFG_TXD |
|
6 |
LCJ_GGND |
17 |
GPS_CFG_RXD |
|
30 |
LCJ_B |
15 |
GGND1 |
|
31 |
LCJ_A |
11 |
PPS_IN+ |
|
9 |
INS_RS422_RX+ |
12 |
PPS_IN- |
|
10 |
INS_RS422_RX- |
13 |
PPS_IN |
|
7 |
INS_RS422_TX+ |
38 |
GGND1 |
|
8 |
INS_RS422_TX- |
39 |
PPS_OUT+ |
|
14 |
GGND1 |
40 |
PPS_OUT- |
|
18 |
BY_COMM1_RX+ |
41 |
GGND1 |
|
19 |
BY_COMM1_RX- |
23 |
USB5V |
|
20 |
BY_COMM1_TX+ |
24 |
USB_DM |
|
21 |
BY_COMM1_TX- |
25 |
USB_DP |
|
22 |
GGND1 |
26 |
USB_GND |
|
43 |
BY_COMM2_RX+ |
48 |
ETH_TXD_P |
|
44 |
BY_COMM2_RX- |
49 |
ETH_TXD_N |
|
45 |
BY_COMM2_TX+ |
50 |
ETH_RXD_P |
|
46 |
BY_COMM2_TX- |
51 |
ETH_RXD_N |

Introduction The TD-100A is a cost-effective inertial measurement device for navigation, control and dynamic measurements...
Introduction TD-201 optical fiber integrated navigation system is a highly reliable and cost-effective optical fiber iner...

Introduction POS series satellite/inertial integrated attitude measurement system is a product independently developed fo...



Thank you for your message and we will contact you within 24 Hours of your submission to resolve your issue
 Online consultation
Online consultation