






Introduction
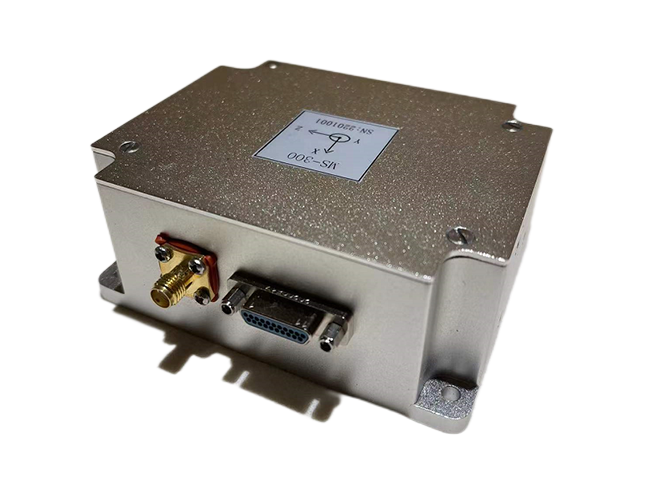
TDMS-300 MEMS integrated navigation system is a highly reliable and cost-effective six-axis MEMS inertial/satellite integrated navigation system, which can be widely used in navigation, control and measurement fields represented by missile-borne and highly dynamic unmanned aerial vehicles (UAVS). TDMS-300 is mainly composed of three-axis MEMS gyroscope, three-axis MEMS accelerometer, information processing circuit, navigation software, structural components, test cable, test software, GNSS receiver (built-in).
The TDMS-300 MEMS series integrated navigation system integrates high-performance MEMS gyroscopes and MEMS accelerometers in a separate structure. The gyroscopes and accelerometers selected for the system represent the leading level of MEMS inertial devices. The zero bias of all temperature parameters, scale factor, non-orthogonal error and acceleration related terms are compensated in the system, which can maintain high measurement accuracy for a long time. At the same time, adaptive attitude algorithm is integrated in the system, which can ensure the measurement accuracy of attitude for a long time.
The following outputs are provided by default: 3D angular velocity, 3D acceleration, gyro temperature, accelerometer temperature, 3D attitude, INS/GNSS position, INS/GNSS speed.
Features
● high precision integrated navigation
● Built-in high dynamic missile-borne receiver
● Small size, low weight, low power consumption
● -40℃ to +80℃ full temperature scale compensation
● 1KHz high speed sampling
● Built-in adaptive Kalman filtering algorithm
● Resistant to harsh mechanical environment
● Online software upgrade function
● Inertial /GNSS integrated navigation function
Application fields
● Medium and long endurance UAVs
● Vehicle positioning and orientation
● Radar/infrared antenna stabilization platform
● Patrol Smart Munition
● Port measurement system
● mobile communication
● UAV/Vehicle/ship/boat attitude reference
● Attitude control
● photoelectric pod
● steady control and sight equipment
Specification
|
MEMS Gyroscope |
|
|
Measurement range(°/s) |
400 |
|
Full temperature bias(°/h) |
15 |
|
Bias stability(°/h,10s smooth) |
3 |
|
Bias repeatability(°/h) |
3 |
|
Non-linearity of scale factor(ppm) |
100 |
|
Bandwidth(Hz) |
100 |
|
MEMS Accelerometer |
|
|
Measurement range(g) |
30 |
|
Full temperature bias(mg) |
2 |
|
Bias stability(μg) |
100 |
|
Bias repeatability(μg) |
100 |
|
Non-linearity of scale factor(ppm) |
500 |
|
Bandwidth(Hz) |
100 |
|
Attitude accuracy |
|
|
Pitch(°,RMS) |
0.05(GNSS aided) |
|
Roll(°,RMS) |
0.05(GNSS aided) |
|
Heading(°,RMS,GNSS aided,dynamic condition) |
0.2 |
|
Electrical/Mechanical Interface |
|
|
Power supply (V) |
9V~36V |
|
Power consumption(W) |
5 |
|
Start-up time(s) |
2 |
|
Communication port |
2 x RS-422,1 x RS-232 |
|
Updating rate(Hz) |
200Hz |
|
Size(mm×mm×mm) |
96mm×75mm×39mm |
|
Weight(g) |
≤200 |
|
Environmental conditions |
|
|
Working temperature(℃) |
-40~80 |
|
Storage temperature(℃) |
-55~85 |
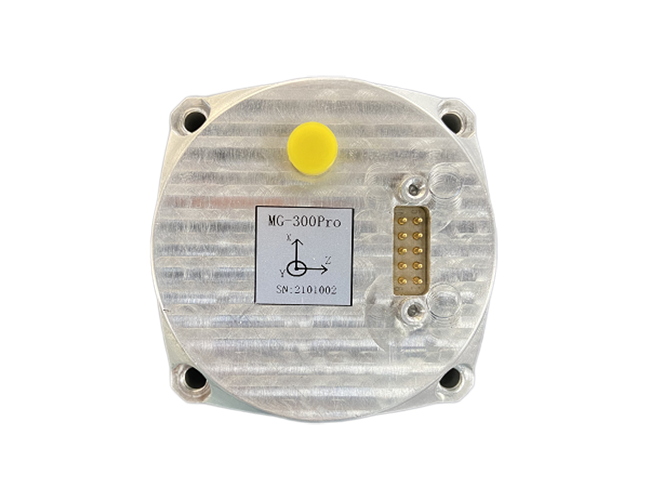
Pin definition
|
Pin No. |
Definition |
|
1 |
28V_SYS+: Power + |
|
2 |
28V_SYS+: Power + |
|
3 |
GD_RSS422_A: Navigation communication A |
|
4 |
GD_RS422_B: Navigation communication B |
|
6 |
IMU_RS422_A: IMU communication A |
|
7 |
IMU_RS422_B: IMU communication B |
|
8 |
IMU_RS422_Y: IMU communication Y |
|
9 |
IMU_RS422_Z: IMU communication Z |
|
10 |
RS4SS_GND: Communication ground |
|
12 |
28V_SYS-: Power - |
|
13 |
28V_SYS-: Power - |
|
14 |
GD_RS422_Y: Navigation communication Y |
|
15 |
GD_RS422_Z: Navigation communication Z |
|
16 |
RS232_RX |
|
17 |
RS232_TX |
|
18 |
RS232_GND |
|
21 |
SHIELD: Shield ground |
Introduction TDMS-300Pro MEMS Integrated navigation system is a highly reliable and cost-effective six-axis MEMS inertial...
Introduction TDMS-300 MEMS integrated navigation system is a highly reliable and cost-effective six-axis MEMS inertial/sa...
Introduction TDMS-200 high accuracy integrated navigation and positioning unit is a real-time navigation and positioning ...



Thank you for your message and we will contact you within 24 Hours of your submission to resolve your issue
 Online consultation
Online consultation